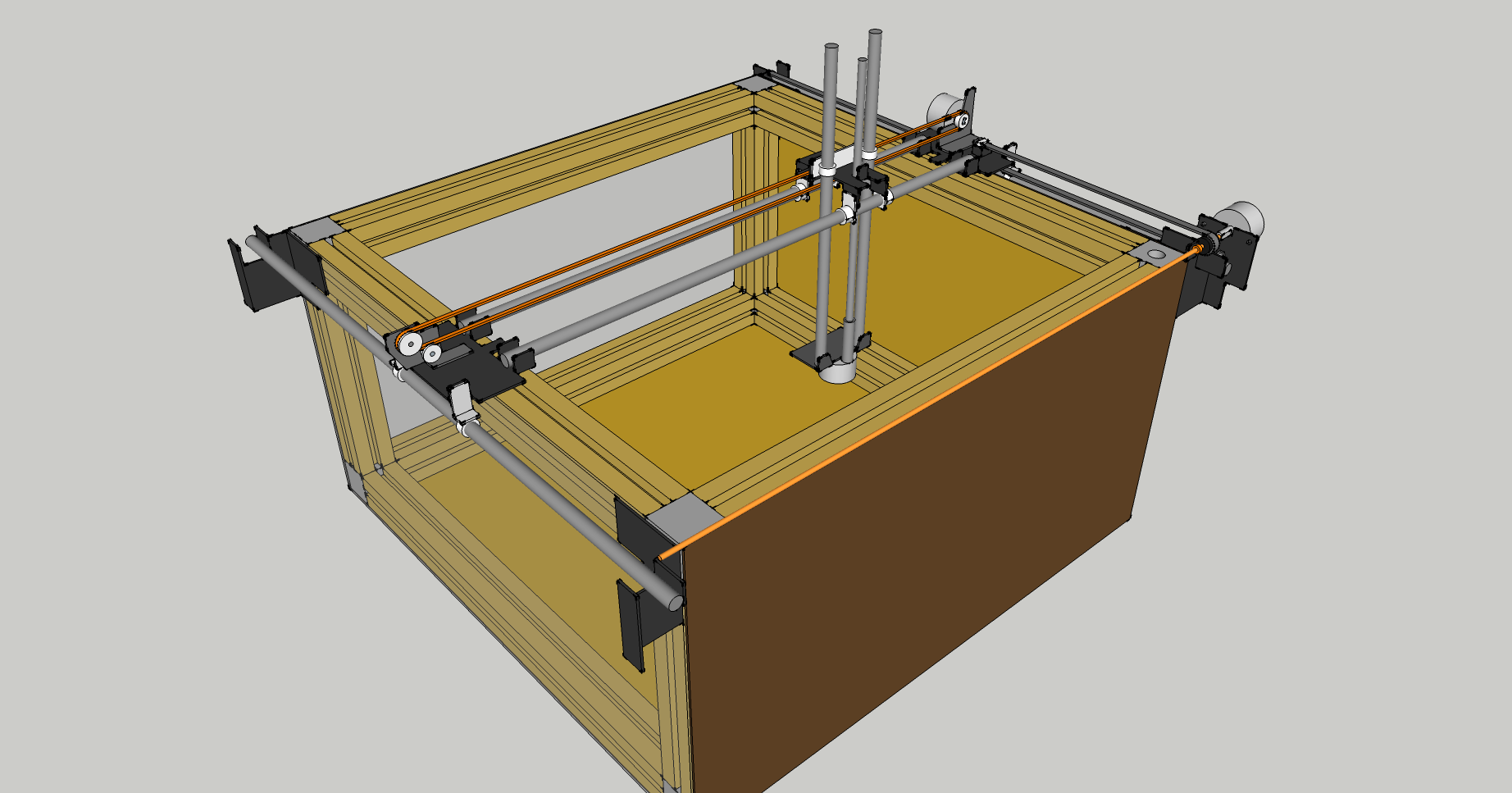
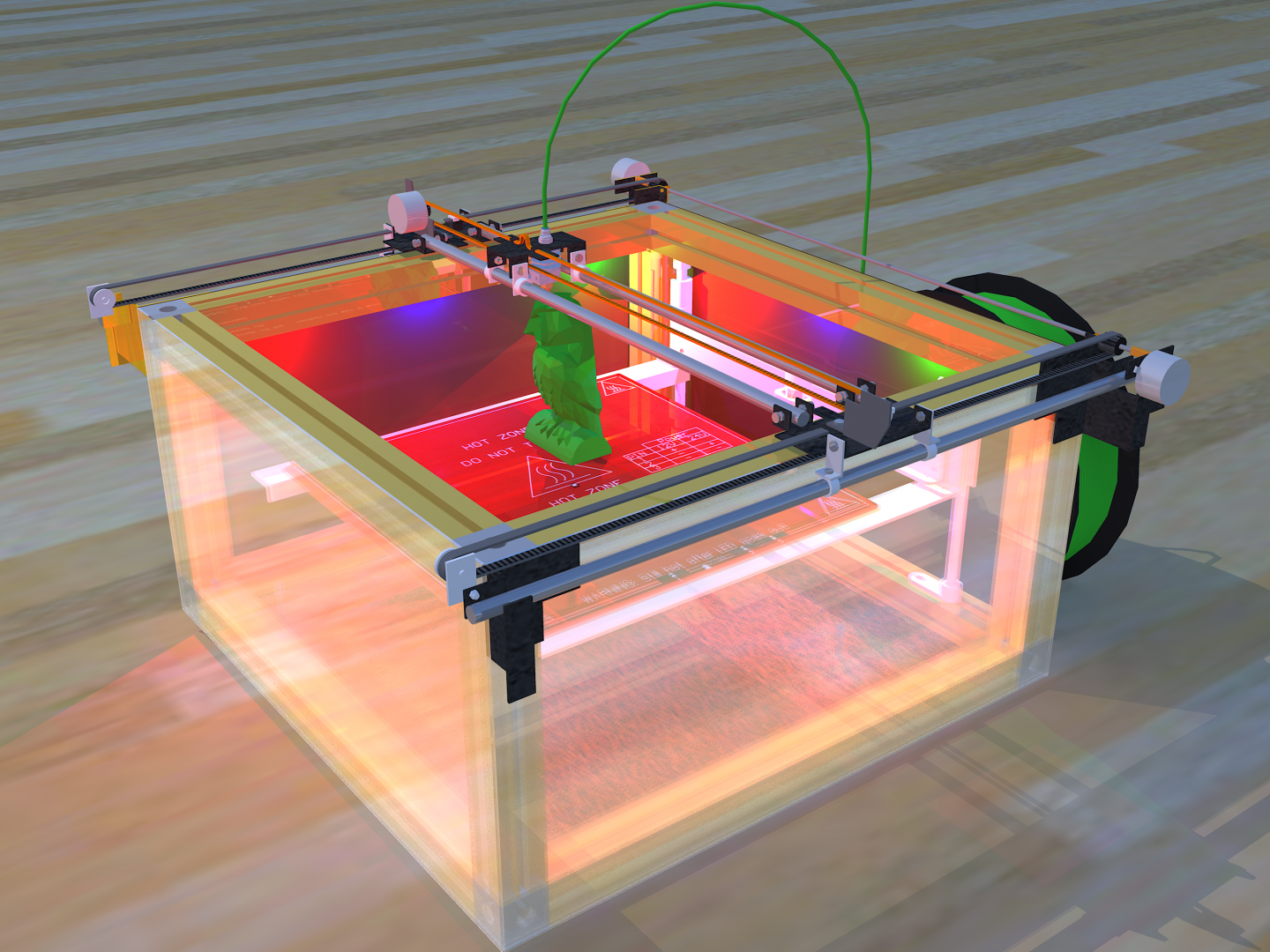
DIY 3D-Drucker
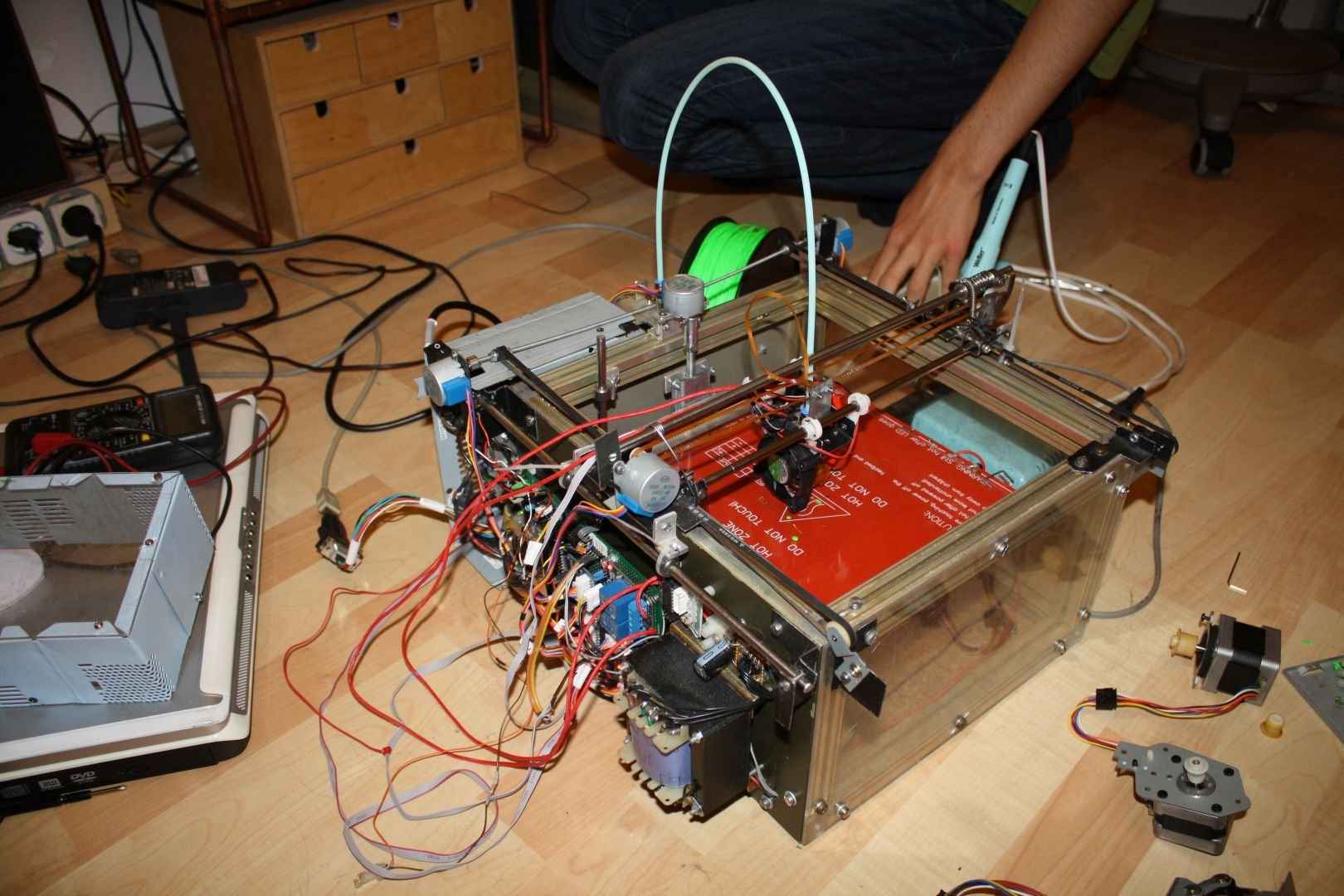
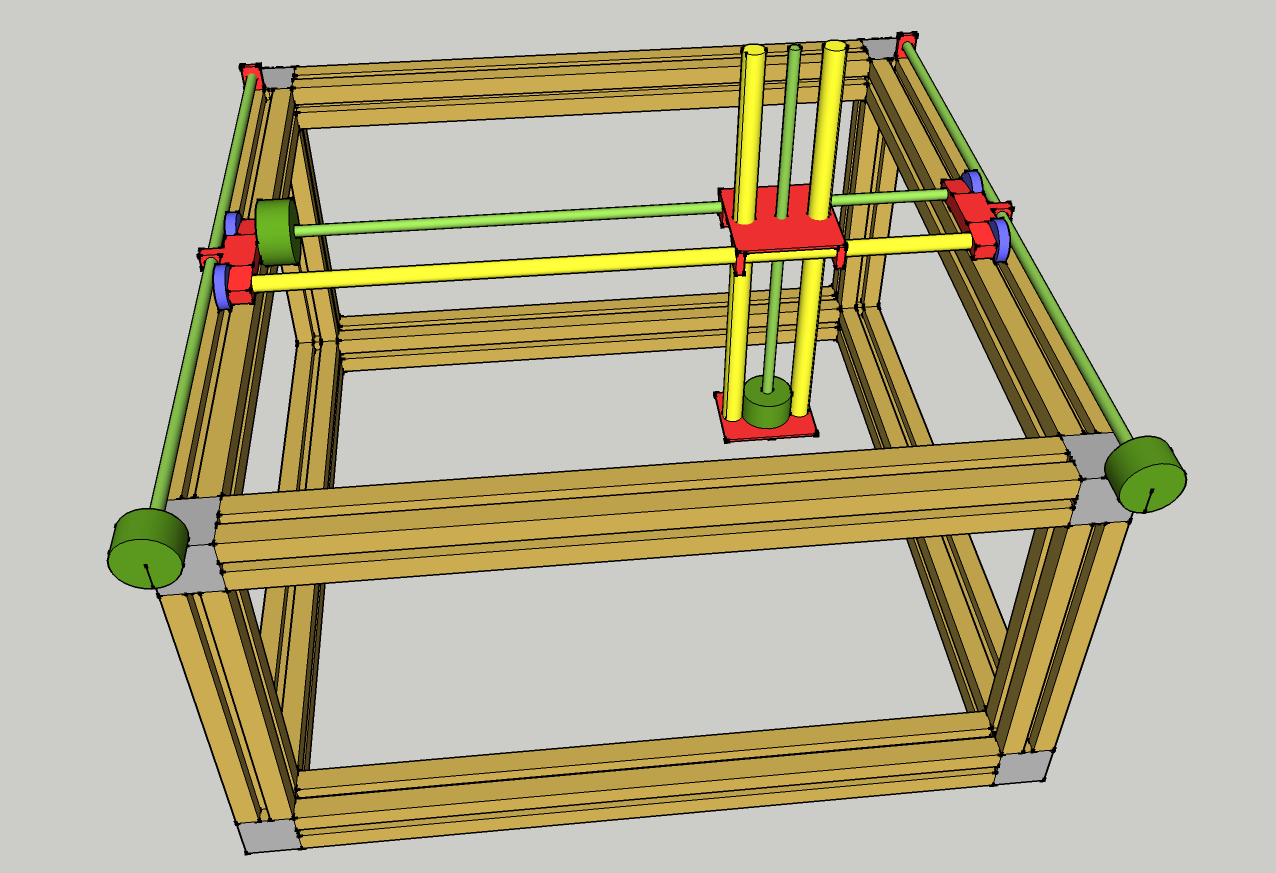
Eines meiner ersten großen Projekte war mein 3D-Drucker 2015.<br> Diesen habe ich hauptsächlich aus alten Elektronikteilen gebastelt und eine eigene Firmware dazu geschrieben.<br> Auf meiner Seite findest du Informationen über 3D-Druck, Videos und interaktive 3D-Animationen.<br>
.jpg)
07 12 (2)
.jpg)
07 12 (8)
.jpg)
07 13 (7)
.jpg)
10 11 (6)
.jpg)
10 12 (22)
.jpg)
10 17 (25)
.jpg)
10 17 (31)

10 28
.jpg)
10 31 (4)
.jpg)
11 08 (11)
.jpg)
11 17 (4)
11 30
.jpg)
12 06 (12)
.jpg)
12 26 (1)
.jpg)
12 29 (1)
.jpg)
04 08 (10)
.jpg)
04 09 (2)
.jpg)
05 14 (4)
.JPG)
08 24 (4)
08 30
09 07
.JPG)
09 11 (1)
.JPG)
09 18 (2)
.jpg)
10 04 (2)
.JPG)
12 30 (5)
D REGAL 2014 10 07
D REGAL 2014 10 13
.png)
D REGAL 2014 11 28 (PRINTHEAD)
D REGAL 2014 12 21
D REGAL V3 2015 07 01
FOTO0008
SCHEMATIK CUT RENDERED 2
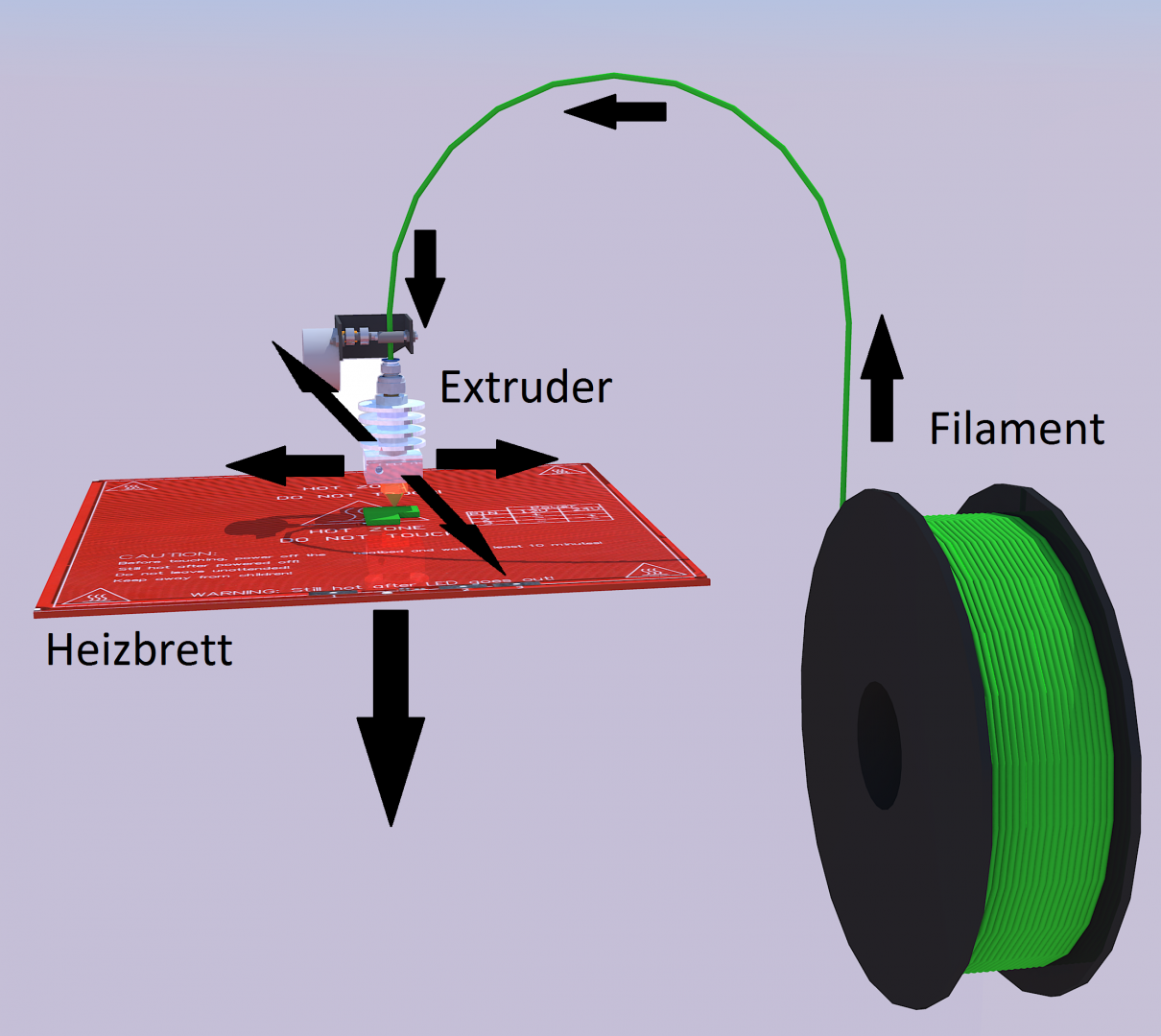
SCHEMATIK KOMPLETT RENDERED 3

DüSE 2015 06 30
FILAMENT EXTRUDER
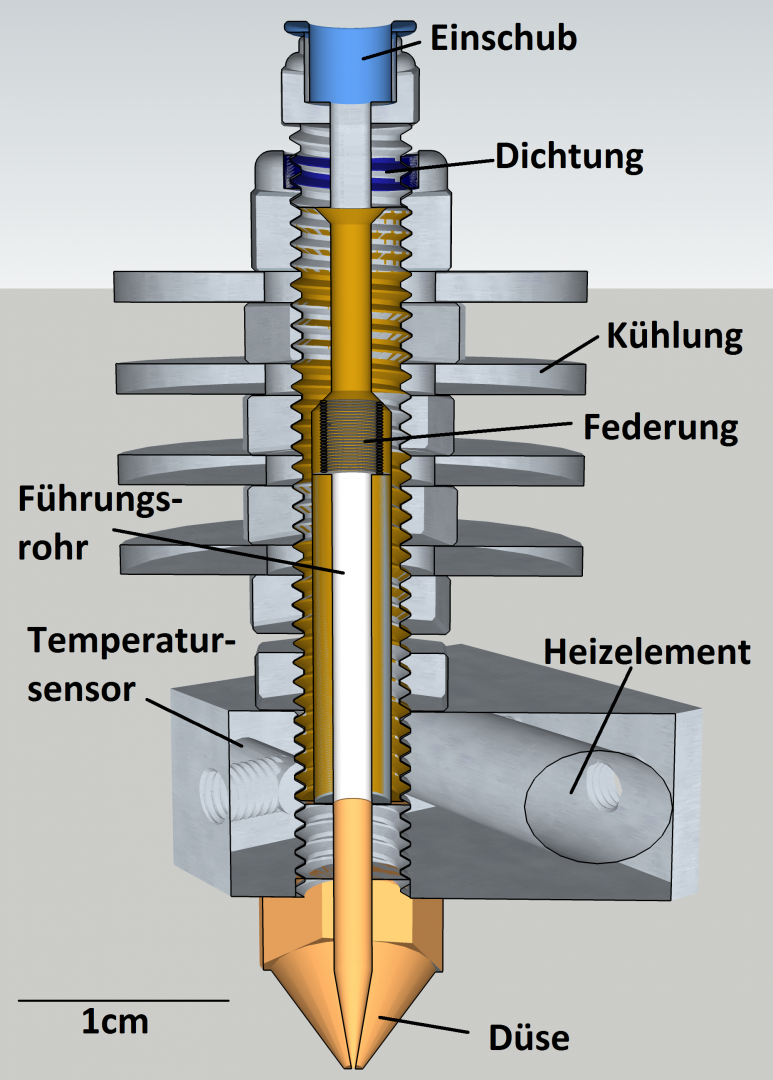
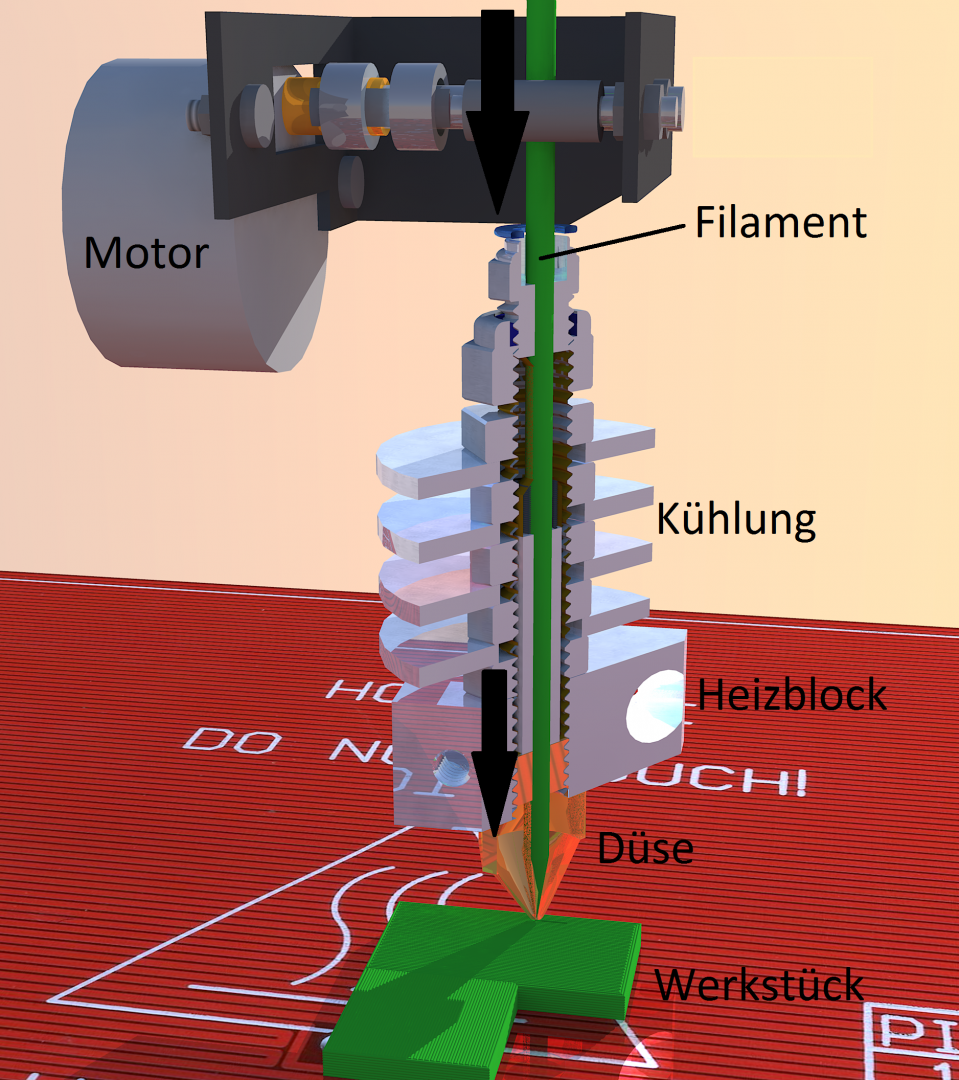
HOTEND V2 QUERSCHNITT BESCHRIFTET
PLAKAT V2
SEITENHALTERUNG MIT MOTOR
SEITENHALTERUNG
Weitere Artikel
Rotary EncoderArduino-Bastelprojekt: Drehgeber mit Encoder für Menüsteuerung und Werteingabe.
Lichterketten Farbverläufe mit NeoPixelArduino-Bastelprojekt: Farbverläufe und Effekte mit WS2812b NeoPixel-LEDs.
SD TemperaturloggerMit einem kleinen Arduino und einem SD-Kartenmodul lassen sich ganz einfach über einen längeren Zeitraum Messdaten wie Temperatur aufzeichnen, um diese später auszuwerten zu können.
Gefällt dir die Webseite? Unterstütz die werbefreie Seite mit einer Spende.
Kommentare