Solar-Tracker
Mehr Licht in der Wohnung dank intelligentem Spiegel, der sich mit der Sonne mit dreht.
Wenn die Wohnung kleine Fenster hat und zu dunkel ist, denken viele vermutlich daran, entweder die Fenster zu vergrößern oder umzuziehen.Es gibt jedoch noch eine dritte technische Möglichkeit, dass mehr Sonnenlicht in die Wohnung fällt: Man nehme einen Spiegel, montiert ihn beweglich mit zwei Motoren in Kombination mit einem Solartracker.
SOLAR TRACKER
- Spiegelhalterung:
- 2x 570 mm
- 2x 790 mm
- 1x 530 mm
- 1x 405 mm
- Motorhalterungen:
- 1x 300 mm
- 1x 140 mm
- 1x 400 mm
- Mast:
- 1x 100 mm
- 1x 500 mm (3030)
- 1x 1000 mm (3030)
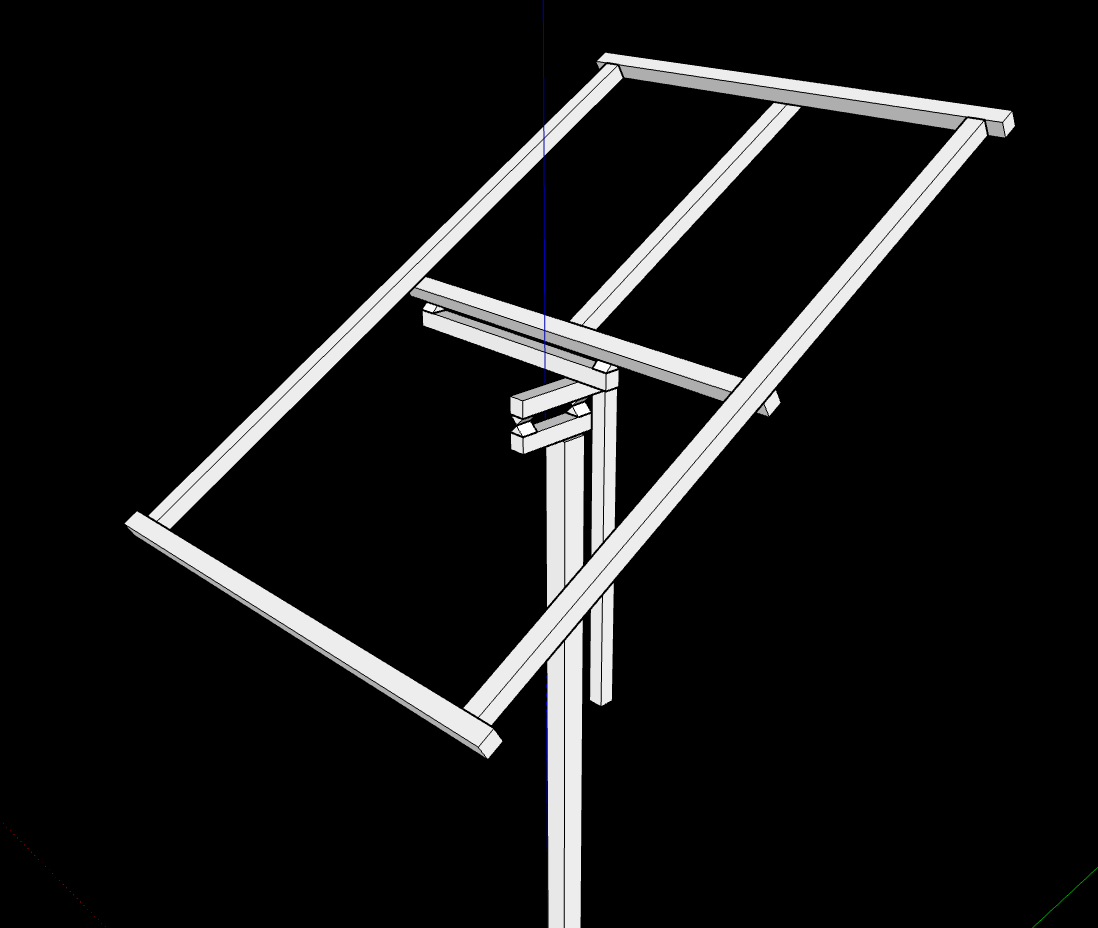
ZEICHNUNG SKETCHUP
- 4x 2020 Scharniere
- 17x 2020 winkel 90° (Alu)
- 1x 2020 winkel 90° (Stahl)
- 6x 3030 Winkel 90° (Alu)
- 4x Aluplatten für Motormontage
- ca. 60x Nut Profilmuttern und Schrauben
- ca. 20x Nut 8 Profilmuttern und Schrauben
- 1x NodeMCU Mikrocontroller
- 1x 4-Fach Relaiskarte
- 1x Wetterfeste Montagebox ca. 16cm x 9cm x 4cm
- 1x 12V Stromversorgung
- 1x Erdkabel
- 1x Sack Beton
- 1x 12V Linearmotor (300mm Stroke)
- 1x 12V Linearmotor (250mm Stroke)
- ein paar Kabel, Lötkolben und Stecker

ZUSAMMENBAU
Die Winkel besitzen herausstehende Nuten, welche ich vorher am Schleifstein abgeschliffen habe. Für die Motoren habe ich zwei Linearantriebe verwendet. Diese besitzen bereits Endschalter.
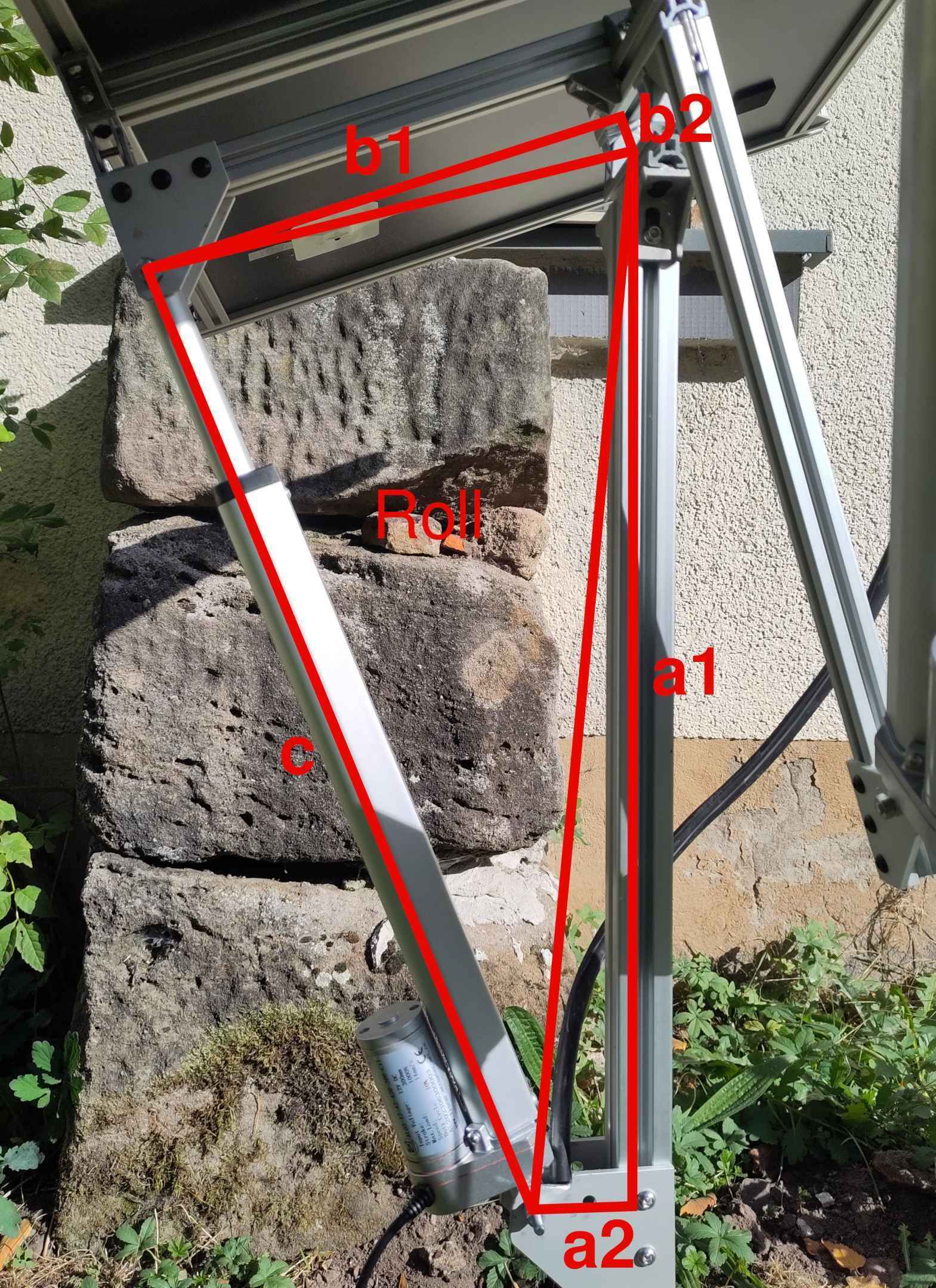
Nun zur Ansteuerung. Die beiden Motoren liegen Orthogonal zueinander. Die günstigste und einfachste Variante ist es, einen Motor am Masten zu befestigen. Dieser steuert die Roll-Achse. D. h. Wenn man von Süden auf den Siegel schaut, das "Kippen" nach Links und Rechts. Der Motor bildet ein Dreieck mit den Seitenlängen a, b, und c. Aus den fixen Längen a1 und a2 bzw. b1 und b2 lassen sich die Seiten a und b bestimmen. Wenn man nun den Winkel an einen bestimmen Winkel platzieren möchte, zieht man erst die Winkel der Dreiecke A und B ab und berechnet anschließend die Seitenlänge c.
MOTOR ROLL

MOTOR PITCH
- Uhrzeit bestimmen [0]
- Sonnenposition (relativ zum Spiegel) berechnen [1]
- Umrechnung in Karthesische Koordinaten
- Winkelhalbierende zu den Fensterkoordinaten berechnen [2]
- Drehung des Koordinatensystems um 90° und Rückrechnung in Kugelkoordinaten
- Berechnung der Motorwinkel für Roll und Pitch [3]
- Berechnung der Längen der zugehörigen Driecke c
- Vergleichen mit vorheriger Position und Motoren bewegen [4]
- Speichern der neuen Position und eine Minute warten
1) Hierfür wird eine extrene Library verwendet. Die Sonnenposition wird in Azimuth (im Uhrzeigersinn von Norden aus) und Elevation (Winkel über dem Horizont) berechnet. Für die Umrechnung in Kugelkoordinaten muss Azimuth auf Phi (Gegen den Uhrzeigesinn, beginnend bei x Achse, welche Richtung Süden zeigt) und Elevation auf Theta (vom zenith aus nach unten gehend) umgerechnet werden. Zusätzlich wird der Offset des Spiegels mit berücksichtigt, da das Fundament nicht exakt nach Norden ausgerichtet ist.
2) Die Winkelhalbierende zwischen Sonnenvektor und Fenstervektor ist der Normalenvektor der Spiegelebene und lässt sich in Kartesischen Koordinaten wesentlich leichter berechnen.
3) Dreht man ein Koordinatensystem indem man x und z vertauscht, so entsprechen in Kugelkoordinaten die Winkel cRoll und cPitch den Winkeln Phi und Theta. Es muss lediglich noch ein konstanter Offset aufgerechnet werden.
4) Da die Motoren keine Positionsgeber haben, wird zur Initialisierung einfach die (bekannte) Endposition angefahren. Bei den auftretenden Lasten kann die Motorgeschwindigkeit bei gleichbleibender Spannung als Konstant angesehen werden. Wenn man eine bestimmte Strecke ausfahren möchte, muss man die aktuelle Position per Software mitloggen. Da die Relais eine gewisse Schaltzeit haben, habe ich nach Tests 200ms als untere Mindestanschaltdauer festgelegt. Daher bleibt der SPiegel immer ein paar Minuten stehen, ehe er zur nächsten Position fährt. Nachts wird wieder die Nullposition angefahren zur Initialisierung.
Die Elektronik habe ich in einer kleinen Box am Mast befestigt. der darüberliegende Spiegel schützt zusätzlich vor Regen. Die Anschlüsse für die Motoren und Stromversorgung habe ich auf die Unterseite der Box gemacht. Das Netzteil befindet sich in der Wohnung, so dass das Erdkabel nur 12V Spannung hat.

MEHR LICHT IN DER WOHNUNG
sunReflector.ino
#include "sunReflector.hpp" void setup() { Serial.begin(9600); // for debugging // testVec3(); // Test vector class //testMotorPin(4); // Test motor pin //testMotorPin(6); // Test motor pin } void loop() { const int utcOffset = 2; // +2 hours (European summer time) setTime(toUtc(compileTime()+60UL, utcOffset)); // add one minute because we need time beween compiling until we plug in the arduino const int motorRollPinContract = 5; // left/right (west/east) const int motorRollPinExpand = 6; const double motorRollA1 = 54.8; // all length units for one motor must be the same, I use cm here. const double motorRollA2 = 6.0; const double motorRollB1 = 25.7; const double motorRollB2 = 4.3-4.0; const double motorRollCMin = 42.2;// according to datasheet 44.0cm but I meassured 42.2cm by hand const double motorRollCMax = motorRollCMin + 30.0; // 30cm stroke from datasheed, not meassured yet // how to meassure motor speed: run motor via software for 10 seconds. Meassure traveled distance and devide by 10s. Voila. const double motorRollSpeed = 1.37e0; // Datasheet said 1.4 but this motor is only 1.37 length units per second (here: cm/s) const int motorPitchPinContract = 3; // forward/backward (north/south) const int motorPitchPinExpand = 4; const double motorPitchA1 = 36.5+3.4; // (in cm) You could use other lenth units for the other motor or the window if you feel so const double motorPitchA2 = 4.0+8.0; const double motorPitchB1 = 40.4; const double motorPitchB2 = 4.0-2.3; const double motorPitchCMin = 37.1;// according to datasheet 36.9cm but I meassured 37.1cm by hand const double motorPitchCMax = motorPitchCMin + 25.0; // 25cm stroke from datasheed, not meassured yet const double motorPitchSpeed = 1.2314e0; // Datasheet said 1.4cm/s but I meassured 1.23 vec3 windowPosition(-142,-10,65); // window position relative to mirror in cartesian coordinates (depth, sideways, vertical) const double wallOffsetAngle = -5;//-5; // wall rotation relative to the mirror (negative value means wall rotated clockwise relative to mirror) const double mirrorOffsetAngle = -25; // mirror rotation relative to north const double latitude = 49.5614939; // now you know where I live but you could have just looked into the legal notice of my website const double longitude = 10.9122589; // Dont edit the code below this line if your name isn't Veit Goetz /* -------------------------------------------------------------------------------------------------------- */ InverseCinematics motorRollGeometry(motorRollA1, motorRollA2, motorRollB1, motorRollB2); InverseCinematics motorPitchGeometry(motorPitchA1, motorPitchA2, motorPitchB1, motorPitchB2); Motor motorRoll(motorRollPinContract, motorRollPinExpand, motorRollCMin, motorRollCMax, motorRollSpeed, motorRollGeometry); Motor motorPitch(motorPitchPinContract, motorPitchPinExpand, motorPitchCMin, motorPitchCMax, motorPitchSpeed, motorPitchGeometry); //testGeometry(motorRollGeometry); //testMotor(motorRoll); //testGeometry(motorPitchGeometry); //testMotor(motorPitch); Reflector mirror(motorRoll, motorPitch); mirror.setWindowCoordinates(windowPosition, wallOffsetAngle); mirror.setMirrorOffsetAngle(mirrorOffsetAngle); mirror.setCoordinates(latitude, longitude); Serial.println("Init done"); while(true){ mirror.updateMotors(); // move mirror Serial.println("wait one minute"); // the sun moves 1° per 4 minutes, so by waiting 1 minutes we are max. 1/4 degree behind delay(60UL*1000UL); // unsigned long because we could get an overflow otherwise Serial.println("wake up"); } }
Weitere Artikel
360° Image StitcherKostenloser Online 360° Image Stitcher für Fotos der Samsung Gear 360 und andere 360° Kameras. Geschrieben in Javascript.
Lichterketten Farbverläufe mit NeoPixelArduino-Bastelprojekt: Farbverläufe und Effekte mit WS2812b NeoPixel-LEDs.
DIY LasercutterEin aktuelles Projekt ist ein 15W Lasercutter.<br>
Wie so oft dient als Steuerung ein Arduino. Für ein sicheres Gehäuse habe ich extra Schutzglas anfertigen lassen. Der Laser wurde im Dezember 2019 fertig, nun arbeite ich an einer Lüftungsanlage.<br>
Gefällt dir die Webseite? Unterstütz die werbefreie Seite mit einer Spende.
Kommentare